

 联系我们
联系我们

LBR iiwa 可以识别装入车顶天线底座时出现的任何故障
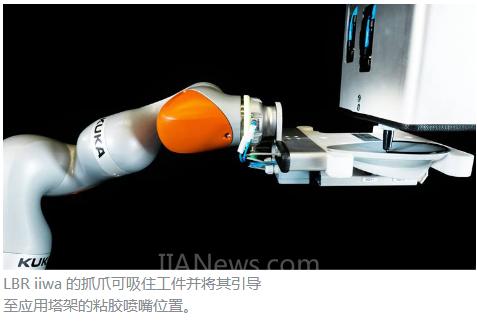
粘接车顶天线底座时,工人手动将工件放入机器人抓爪中,抓爪会将工件吸住并引导至应用塔架的粘胶喷嘴位置。LBR iiwa 将车顶天线底座从下方缓慢地移到粘胶喷嘴处。如果中途遇到障碍物,则借助碰撞识别功能略微后退,然后重新开始移动。三次尝试后,机器人才会返回初始位置。如果顺利就位,则开始粘接过程,随着机器人沿轨迹运行,对胶条进行均匀细致的涂抹。接着,工人重新在起始点取下车顶天线底座并安装到车辆上。
借助 LBR iiwa 的第七根轴实现**的粘合缝
在汽车总装的油箱自动化粘接过程中,技术工人使用机械手将油箱引导至转台。在转台上,工人对油箱进行清洁并正确定位,然后将其转交给机器人进行下一步加工。当到达固定油箱上的起始点时,喷嘴在压力作用下打开。这样便不会产生气泡。接着机器人将粘合缝高度均匀地涂抹到油箱上。应用头上的传感器监控粘合缝的高度是否**匹配。LBR iiwa 凭借第七根随动旋转轴可以在 360 度的活动范围内实施粘接,而无需改变姿态或中断过程。一旦 LBR iiwa 结束作业,技术工人便将油箱装入车身内的指定位置。
“尽管可以手动涂抹胶条,但是其效果完全无法与机器人所能达到的精度相媲美。”——Dieter Ahlborn,Director APT/Gluing Final Assembly(先进工艺技术/粘接总装部门总监),Dürr Systems AG(杜尔系统股份公司)
人机协作解决方案引领未来市场方向
Dürr 已经在粘接行业售出十台设备。因此,这家设备与机器制造商对未来发展十分乐观,并且已经开始研发用机器人粘接小型垫圈以及其他工件的人机协作解决方案。
来源:网络
更多资讯:库卡机器人